




















































智能制造所科研团队在移动机器人本体研发、定位与建图(SLAM)与导航以及决策调度开展技术研究,主要包括:1)针对室内时变、动态场景的全局定位鲁棒性问题,研究基于视觉、二维激光雷达、IMU融合的语义SLAM算法;针对室外低速场景非结构道路多样化、遮挡严重,研究基于三维激光雷达、GNSS、IMU融合的SLAM算法,实现室内外移动机器人环境智能感知与可靠定位。2)针对传统调度系统响应速度慢,无法应对变化;执行过程柔性差,无法适应各类场景需求;交互性差,无法接受人工输入等难点;研究基于博弈论的分布式控制策略,开发单体智能规划-多机任务调度系统,实现多AMR场景下的最优任务分配、路径规划和交通管制。3)研发移动机器人核心导航控制器,能够支持激光、视觉、磁导航等定位导航传感器、兼容多种运动构型的移动机器人系统,实现室内外地图构建与编辑,自主导航规划等功能,满足于工业、服务、医疗和园区等应用需求。
技术指标:
全局定位精度:±2cm;
局部定位精度:±0.5mm。
先进性:
自主移动机器人是机器人进入生活服务执行服务操作的关键平台。自主研发的自主移动机器人配置多传感感知系统和导航控制器,基于多感紧耦合SLAM技术和实时无碰路径规划技术可实现机器人在未知复杂场景的自主地图构建、自主巡航、行人检测及动态避障等功能,具有定位精度高,环境适应性强及安全性高等特点。
应用前景:
自动化物流仓库、场馆服务、安全巡检等。
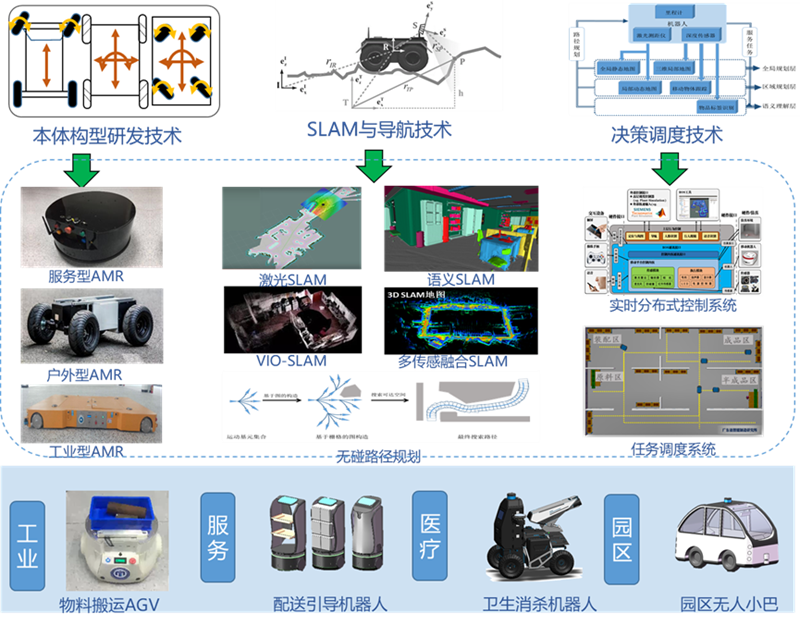
图 移动机器人自主导航技术


