




















































近日,国际生物与物理交叉学科权威期刊Biophysical Journal刊登了题为Evaluation of Cell’s Passability in the ECM Network的研究论文,报道广东省科学院智能制造研究所机器人技术团队在靶向机器人运动路径规划方面取得的重要进展。该研究成果可降低靶向机器人在人体中运动的能量消耗,从而提升靶向机器人在实际应用场景中的工作效率,帮助靶向机器人进入人体精准到达指定位置,实施细胞层次的治疗,在未来癌症治疗中将发挥极其重要的作用。
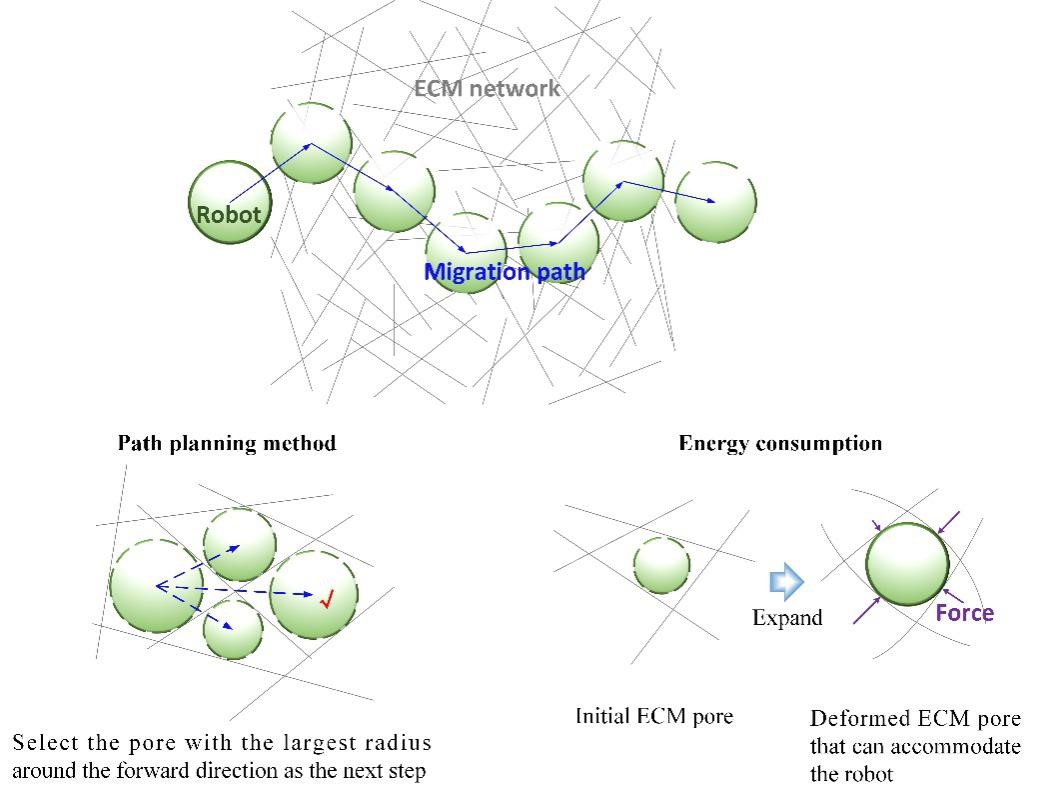
靶向机器人在ECM中迁移示意图
细胞外基质是靶向机器人运动的主要场所之一,主要由肌动蛋白组成,成纤维网络状,对靶向机器人起到支撑等作用,其孔洞半径一般数倍小于靶向机器人。靶向机器人向目标运动时须“挤开”部分胶原蛋白纤维,“挤开”纤维的行为伴随能量消耗。网络状的结构使细胞外基质拥有众多孔洞,因此机器人运动的可能路径非常多。如何能在众多可能的路径中寻找一条能量消耗最低的优质运动路径,是靶向机器人运动路径规划的关键问题。为此,团队成员利用数值模型提出了一种评估机器人“挤开”周围纤维所需能量的方法,同时提出一种以平均孔径最大为原则规划机器人运动路线的方案。对比规划出的优质路径和长度最短的直线路径发现,优质路径在大多情况下可降低机器人的能量消耗。这说明运动规划对靶向机器人是有效且有意义的。
本项研究工作得到了国家自然科学重点基金、青年基金,以及广州市基础与应用基础研究基金的资助。


